人形机器人的交互智能依赖于触觉感知
人形机器人市场规模将从2023年的18亿美元增长到2028年的138亿美元。
灵巧手被用来完成复杂的任务,这是机器人感知外部世界最重要的部分
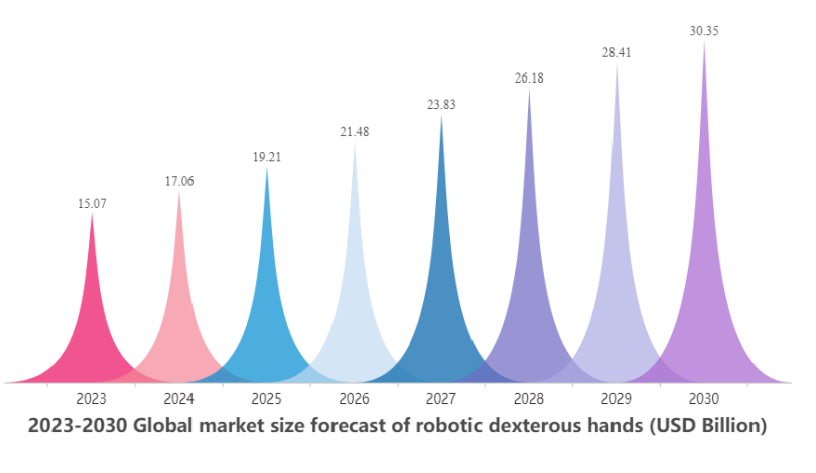
到2030年,全球机器人灵巧市场规模预计将超过30亿美元。
—中国产业研究院(CBIRI)
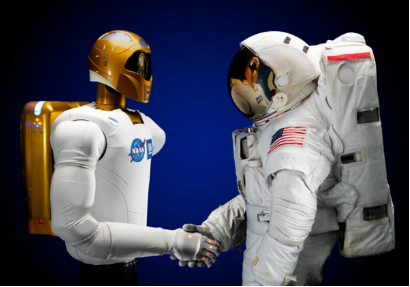
灵巧手可以在航空航天、医疗假肢、工业和科学领域实现大规模应用
斯特拉人形机器人
小鹏人形机器人
特斯拉擎天柱二代
机器人需要如人类灵巧的操控能力
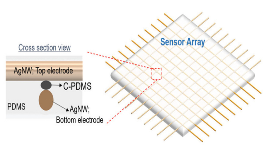
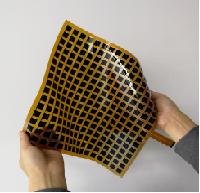
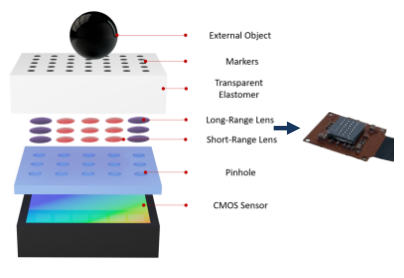
2009年,美国国家科学院院士、美国艺术与科学院院士,美国麻省理工大学教授Edward开辟了视触觉传感器
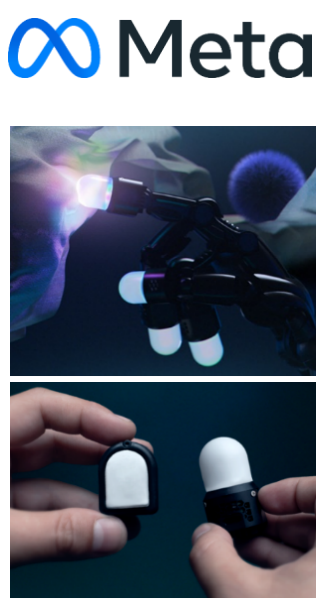
对标麻省理工等 产品,我们产品的尺寸全球更优, 信号更多模态(全球领先),成本更低
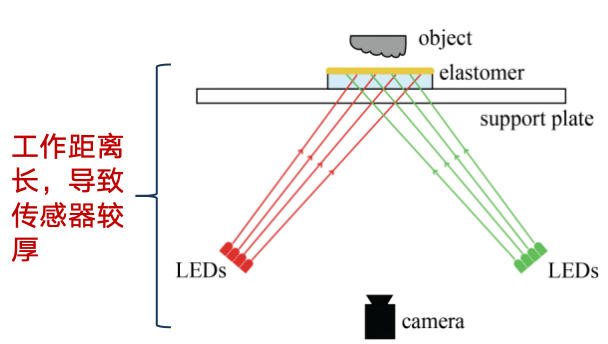
技术挑战
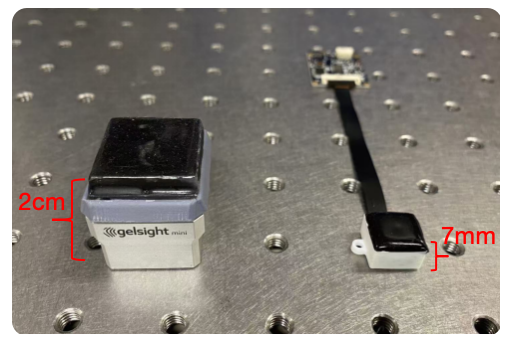
样品对比
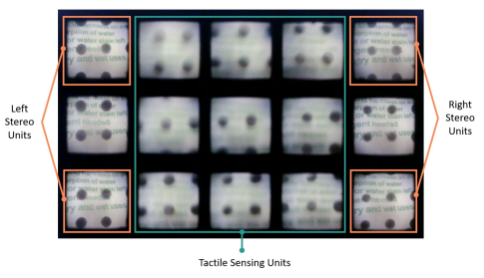
3D 视觉+触觉展示(接触前测距,接触后测3D力)